Команды роботов SMuRF могут помочь с РАО в Селлафилде (и других местах)
Британские инженеры собрали команду роботов, известных как SMuRF, чтобы решить растущую проблему вывода ядерных объектов из эксплуатации на таких площадках, как Селлафилд.
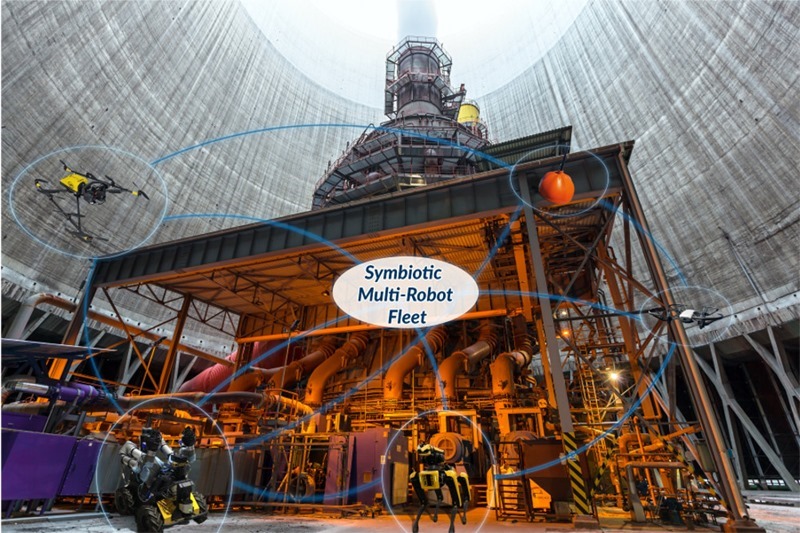
Сокращенно от Symbiotic Multi-Robot Fleet, мультимодальная система SMuRF включает в себя робота Spot компании Boston Dynamics, а также колесных и воздушных роботов. Работая вместе, SMuRF образуют киберфизическую систему (CPS), способную взаимодействовать с 1600 датчиками, роботами и другими цифровыми и физическими объектами в режиме «почти реального времени», а также держать в курсе событий человека-оператора. Система была разработана инженерами из Университета Глазго, Манчестерского университета, Бристольской лаборатории робототехники и Университета Хериот-Ватт.
В статье, опубликованной в журнале IET Cyber-Systems and Robotics, исследователи рассказали, как они развернули SMuRFs в практической демонстрации на объекте Robotics and Artificial Intelligence Collaboration (RAICo) в Камбрии (Англия). Роботы совместно составляли карту окружающей среды, создавая трехмерный цифровой двойник пространства с помощью своих бортовых датчиков и дополняя ее данными, полученными с пилотируемого беспилотного летательного аппарата. Во время демонстрации Spot с помощью своей гибкой руки доставал инструменты для более тщательного сканирования, а колесные роботы Scout и CARMA определяли уровень радиации. Робот CARMA также успешно обнаружил имитацию разлива радиоактивной жидкости под бочкой с отходами.
«Роботы, которых мы запрограммировали и создали в этом прототипе SMuRF, обладают своими уникальными способностями и ограничениями, а также собственными операционными системами, — говорит автор статьи Дэниел Митчелл из Инженерной школы Джеймса Уатта при Университете Глазго. – Во время развертывания системы SMuRF на объекте RAICo мы смогли показать, насколько хорошо роботы могут работать вместе и как созданный нами цифровой двойник может обеспечить замечательную осведомленность о ситуации для человека-оператора. Это может сделать их идеально подходящими для работы в потенциально опасных средах, таких как ядерная инспекция и вывод из эксплуатации. Люди по-прежнему должны будут контролировать и направлять роботов, но их высокий уровень автономности может помочь обеспечить безопасность людей, позволяя им взаимодействовать с роботами со своих рабочих мест, а не посещать рабочие площадки».
Недавнее расследование Guardian вызвало множество вопросов по поводу безопасности и методов работы на ядерном объекте Селлафилд в Камбрии, который называют «самым токсичным ядерным объектом Европы». Расследование подчеркнуло растущую проблему вывода ядерных объектов из эксплуатации, а также ограниченность человеческих возможностей в решении проблем, связанных с высокотоксичными ядерными отходами. Необходимы лучшие решения, особенно в свете той важной роли, которую новая ядерная энергия должна сыграть в энергетическом переходе.
По словам соавтора исследования Дэвида Флинна, профессора кафедры киберфизических систем Университета Глазго, системы SMuRF могут найти применение и за пределами ядерной сферы.
«Подобные автономные роботизированные команды обладают огромным потенциалом для выполнения широкого спектра опасных, грязных, скучных, далеких и дорогих работ, — говорит он. – Помимо работы в ядерном секторе, огромный дополнительный потенциал существует в таких отраслях, как морская энергетика, где системы SMuRF могут выполнять множество рутинных задач по осмотру и ремонту. В настоящее время эти задачи являются дорогостоящими, поскольку часто требуют доставки персонала на вертолетах на морские объекты, что может быть затруднено из-за плохой погоды».


")